Introduction
The single inverted pendulum (SIP) model describes an unstable dynamic system where a vertical rod (pendulum) is mounted on a cart that can freely move along a horizontal surface. The wheels of the cart are driven by a motor, and by controlling the motor, the cart’s motion can be adjusted to balance the rod.
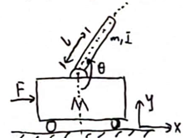
In this system:
- Input: Torque applied to the cart’s wheels.
- Output: Position of the cart and the angle of the rod relative to the vertical.
Notations
| Notation | Definition |
|---|---|
| M | Mass of cart |
| m | Mass of pendulum |
| L | Distance from the center of gravity of pendulum to the joint |
| I | The moment of inertia of pendulum |
| b | Damping coefficient |
| u(t) | External force |
| x | Displacement of cart |
| θ | Angle of pendulum with respect to -y direction |
Force Analysis
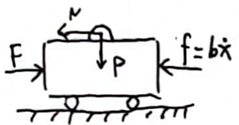
From Figure 2, we can derive the following equations:
$$ M\ddot{x} + b\dot{x} + N = F \tag{1} $$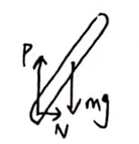
From Figure 3, we can derive:
$$ N = m \frac{d^2}{dt^2}(x + l\sin\theta) = m\ddot{x} + ml\ddot{\theta}\cos\theta - ml\dot{\theta}^2\sin\theta \tag{2} $$$$ P = mg + m \frac{d^2}{dt^2}(l\cos\theta) = mg - ml\ddot{\theta}\sin\theta - ml\dot{\theta}^2\cos\theta \tag{3} $$$$ I\ddot{\theta} = -P l\sin\theta - N l\cos\theta \tag{4} $$ODE
Substituting equation (2) into equation (1), and substituting equations (2), (3) into equation (4) yields:
$$ (M+m)\ddot{x} + b\dot{x} + ml\ddot{\phi}\cos\theta - ml\dot{\theta}^2\sin\theta = F \tag{5} $$$$ (I - ml^2\sin^2\theta + ml^2\cos^2\theta)\ddot{\theta} - 2ml^2\sin\theta\cos\theta\dot{\theta}^2 + lm g\sin\theta = -lm\cos\theta\ddot{x} \tag{6} $$$$\theta = \pi + \phi $$$$\phi \to 0 , \sin\theta \approx -\phi , \cos\theta \approx -1 , \dot{\theta}^2 \approx 0 $$, we get:
$$ (M+m)\ddot{x} + b\dot{x} + ml\ddot{\phi} = F \tag{7} $$$$ (I + ml^2)\ddot{\phi} - mgl\phi = ml\ddot{x} \tag{8} $$Transfer Function
After applying Laplace transform, we get:
$$ \big((M+m)s^2 + bs\big)X(s) + mls^2\Phi(s) = U(s) \tag{9} $$$$ \big((I + ml^2)s^2 - mgl\big)\Phi(s) = mls^2 X(s) \tag{10} $$where \( F = u(t) \). Therefore, the transfer functions are:
$$ G_x(s) = \frac{X(s)}{U(s)} = \frac{(I + ml^2)s^2 - mgl}{\big((M+m)(I+ml^2) - m^2l^2\big)s^4 + b(I+ml^2)s^3 - mgl(M+m)s^2 - bmgls} $$$$ G_\phi(s) = \frac{\Phi(s)}{U(s)} = \frac{mls}{\big((M+m)(I+ml^2) - m^2l^2\big)s^3 + b(I+ml^2)s^2 - mgl(M+m)s - bmgl} $$Matrix Form
$$ \vec{x} = \begin{bmatrix} x \\ \dot{x} \\ \phi \\ \dot{\phi} \end{bmatrix}, \quad \dot{\vec{x}} = A\vec{x} + B\vec{u}, \quad \vec{y} = C\vec{x} + D\vec{u} $$$$ p = I(M+m) + Mml^2 $$, the matrices are defined as:
$$ A = \begin{bmatrix} 0 & 1 & 0 & 0 \\\ 0 & -\frac{(I+ml^2)b}{p} & \frac{(m^2g l^2)}{p} & 0 \\\ 0 & 0 & 0 & 1 \\\ 0 & -\frac{mlb}{p} & \frac{mgl(M+m)}{p} & 0 \end{bmatrix}, \quad B = \begin{bmatrix} 0 \\\ \frac{(I+ml^2)}{p} \\\ 0 \\\ \frac{ml}{p} \end{bmatrix} $$$$ C = \begin{bmatrix} 1 & 0 & 0 & 0 \\\ 0 & 0 & 1 & 0 \end{bmatrix}, \quad D = \begin{bmatrix} 0 \\\ 0 \end{bmatrix} $$The above matrices can be defined and calculated in Python as follows:
|
|
LQR Control
The performance index for the LQR control is given by:
$$ J_{\text{min}} = \int_{0}^{\infty} \big(x^T Q x + u^T R u\big) dt $$The control law is defined as:
$$ u = -Kx = -[k_1, k_2, \dots] \begin{bmatrix} x_1 \\\ x_2 \\\ \vdots \end{bmatrix} $$The closed-loop state-space equation becomes:
$$ \dot{\vec{x}} = (A - BK)\vec{x} = A_{\text{cl}} \vec{x} $$For this system, the \( Q \) matrix is defined as:
$$ Q = \begin{bmatrix} a & 0 & 0 & 0 \\\ 0 & b & 0 & 0 \\\ 0 & 0 & c & 0 \\\ 0 & 0 & 0 & d \end{bmatrix} $$Where:
- Increasing \( a \) increases the weight on the cart’s position, leading to faster balance.
- Increasing \( c \) increases the weight on the pendulum’s angle, allowing recovery from larger offset angles.
- Increasing \( R \) slows down the balancing process.
Python Code:
The LQR control can be implemented in Python as follows:
|
|
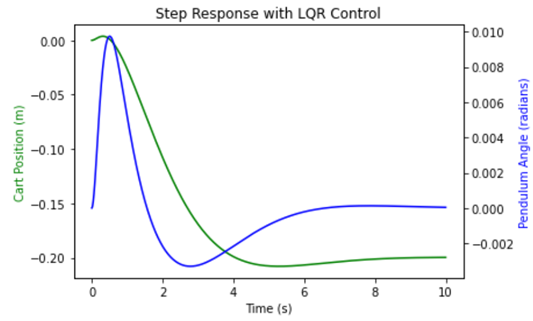
Simulation
Python Code:
|
|
We can see the simulation result in Figure 4.
Mujoco Simulation
The Mujoco simulation demonstrates the performance of the LQR control applied to the inverted pendulum system. Below is the Python code to simulate the system in the Mujoco environment:
|
|
We can see the simulation result in Figure 5.
Reference
https://zhuanlan.zhihu.com/p/54071212?utm_psn=1853238306768289792